Are you looking for an answer to the topic “Control System – Transient Response Specification – ElectronicsGuide4u“? We answer all your questions at the website Chambazone.com in category: 40+ Marketing Blog Topics & Ideas. You will find the answer right below.
Keep Reading
Table of Contents
LCS 17 – Transient response specification of first order transfer functions
Images related to the topicLCS 17 – Transient response specification of first order transfer functions
As we saw in the previous article, the most important thing in transient response analysis is the underdamped response. We define the transient response specification for a unit step input as follows: sin where, and c(t) = 1 – sin ( t + ) The typical transient response for a step input is as follows: The important specification for transient behavior is Listed below: Delay time ( ). Rise Time(). Peak hours (). overpeak(). stable schedule(). Now let’s define these terms separately: Latency(): It can be defined as the time it takes for the response to reach 50% of the final value on the first attempt. It can be expressed as: This is the time it takes to respond to a 10% rise from the full size of the suppression system. For an underdamped system, the rise time is the time it takes for the response to rise from 0% to 100% of full scale on the first try. Such a formula is: =sec peaktime(): This is the time for the reaction to reach its initial (first) peak. After all, the first peak is the highest peak reached. =sec Peak Overshoot() : It is the highest peak of the response calculated from the initial input signal. It is also the highest possible error between the output and the input. It is usually expressed as a percentage as follows: Percent of == Settling Time () : It can be defined as the time input value for the transient damped oscillation to pass through a given tolerance band (between 2% and 5%) ). = Note: Rise time, peak time and settling time give us information about the speed of transient response. We will now derive each of these response specifications (except for clarity). 1. Derivation of Rise Time (): For an underdamped system, this is the time it takes for the output to reach 100% of the input value on the first try. So at t = , c(t) = 1 we know that c(t) = 1 – sin( ) at t = , c(t) = 1 (for all ‘t’ we treat it as ‘) 1 – sin ( t + ) = 1 , then, sin ( t + ) = 0 , but not zero, , = 0 , so, = 0 , we know sin n = 0 where n = 1, 2 . . . then sin() = 0 is calculated only if n = n – n – , then t = , , then t = , the output reaches 100% of the input in the first attempt, i.e. at n = 1 , = s 2 o’clock. Peak Time () : We know that c(t) = 1 – sin() when the value of c(t) reaches a maximum value, and becomes a maximum value at t = c(t). Therefore, we should use the maximum value theorem (from the property of derivatives in mathematics), which states that the derivative of a maximum value is zero. [c(t)] = 0 (at time t = ) , so, [ 1 – sin ( )] = 0 (at time t = ) , we differentiate c(t) with zero, [ 1 – sin ( )] = 0 , then , , we also know that if we square both ses and substitute the value into the equation, but it cannot be zero, then , , , , = , , = , from the properties of the trigonometric relationship we know that t = , or = (for the first crossing, i.e. n = 1), also = seconds. If n = 2, we get the time of the first crossing. If n = 3, we get the time of the second crossing, which is the maximum value of c(t) measured above the input value. So we can easily say that at time t = to be computed, then we have, = c(t) – 1 (at time t = ) , c(t) = 1 – sin( ) – 1 , (because t = =) Sin () = – sin, = sin also from the standard poldiagram (which we saw in my previous post), sinθ =, sinθ =, = = = (since), % = x 100 4.): The settling time of an underdamped system consists of the conjugate complex poles given by: In addition, sin ( ) We have seen that the exponential part of equation () above determines the speed of the response. The sinusoal part proves oscillation only. Therefore, when calculating the settling time, our main focus should be on the exponential part of the above equation. If we allow a 2% tolerance, then () = 0.02, also since we are dealing with an underdamped system of ”<<< 1, we can ignore the denominator, then, , () = 0.02, recording both ses, = -3.912 (at time t = '' ) = 4 (approximately), so == sec. NOTE: The above formula is only val for a 2% tolerance zone. We're finally wrapping up this wonderful post (really??). I know the derivation part is a bit boring and hard to explain at first glance. I have to say, before diving into the derivation, please memorize all the formulas (in exams, expect direct questions in the formulas). See you soon in my next article. report this ad
What is transient response specification?
Transient response specification of second order system
The performance of the control system are expressed in terms of transient response to a unit step input because it is easy to generate initial condition basically are zero. Following are the common transient response characteristics: Delay Time. Rise Time.
What is transient response in process control?
Transient Response. In control systems, a transient response (which is also known as a natural response) is the system response to any variation from a steady state or an equilibrium position. The examples of transient responses are step and impulse responses which occur due to a step and an impulse input respectively.
How do you calculate transient response?
- An easy way to do this is simply to: Take the Laplace Transform of the system differential equation. …
- Step 2) Solve the resulting algebraic equation. We solve for our output, X(s): …
- Step 3) Take the inverse Laplace Transform using Partial Fraction Expansion.
How can a transient response be improved in a control system?
The following methods are often used to improve the transient response: Increasing the output capacitance – More capacitance on the output means more stored energy to support the load transient until the converter starts to react, leading to lower voltage excursions.
What is MP in control system?
Overview. A DIASYS Netmation Multiple Process Station (MPS) is a controller used for control operation and ON/OFF control for the site. An attention to detail is employed throughout the MPS to ensure reliability and controllability.
What is the settling time for 2% criterion?
Settling time (ts) is the time required for a response to become steady. It is defined as the time required by the response to reach and steady within specified range of 2 % to 5 % of its final value. Steady-state error (e ss ) is the difference between actual output and desired output at the infinite range of time.
Why do we need transient response?
Transient response is a measure of how well a DC supply, such as the Sorensen SG Series, copes with changes in current demand or how well the supply follows load impedance changes. This is an important specification in many applications, such as mobile phone testing and testing automotive relays and fuses.
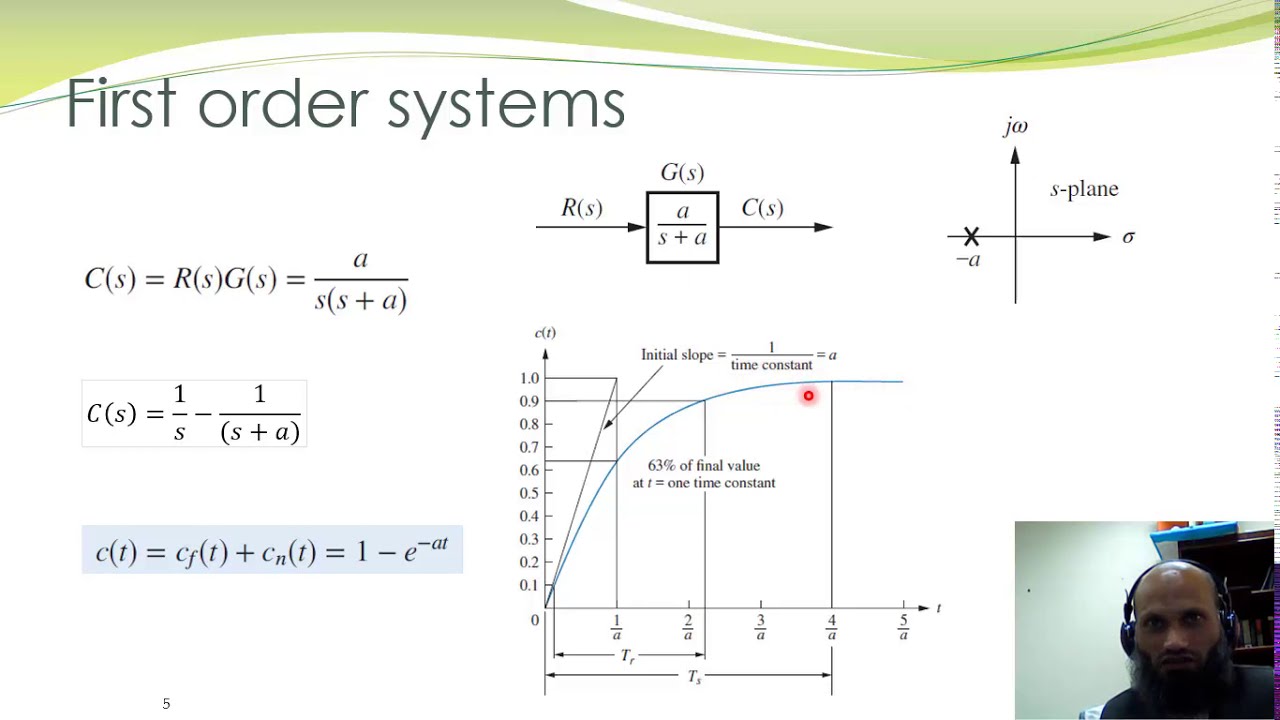
What is transient response of first order system?
…
Summary of Time Response of the First Order System.
| Input | Output |
|---|---|
| Unit Step Signal r(t)=u(t)For,t≥0 | c(t)=(1−e−t/τ)u(t)For,t≥0 |
What is a transient system?
A system is said to be transient or in a transient state when a process variable or variables have been changed and the system has not yet reached a steady state. The time taken for the circuit to change from one steady state to another steady state is called the transient time.
What is transient time in control system?
Transient Response
After applying input to the control system, output takes certain time to reach steady state. So, the output will be in transient state till it goes to a steady state. Therefore, the response of the control system during the transient state is known as transient response.
What is the difference between steady state response and transient response?
In general, nearly every process or system has both a steady state and a transient state. Also, a steady state establishes after a specific time in your system. However, a transient state is essentially the time between the beginning of the event and the steady state.
See some more details on the topic Control System – Transient Response Specification – ElectronicsGuide4u here:
Control System – Transient Response – Electronicsguide4U …
The 11 Latest Answer for question: “Control System – Transient response – ElectronicsGue4u”? Please visit this website to see the detailed …
Transient-response Specifications – Control Systems
The response in time of a control system is usually dived into two parts: the transient response and the steady-state response.
Transient and Steady State Response in a Control System
When we study the analysis of the transient state and steady state response of control system it is very essential to know a few basic terms …
Time Response of second order system – Javatpoint
Transient response specification of second order system. The performance of the control system are expressed in terms of transient response to a unit step …
Related searches to Control System – Transient Response Specification – ElectronicsGuide4u
- transient response parameters
- transient response specifications of second order system
- transient response in control system
Information related to the topic Control System – Transient Response Specification – ElectronicsGuide4u
Here are the search results of the thread Control System – Transient Response Specification – ElectronicsGuide4u from Bing. You can read more if you want.
You have just come across an article on the topic Control System – Transient Response Specification – ElectronicsGuide4u. If you found this article useful, please share it. Thank you very much.