Are you looking for an answer to the topic “Control System – Transfer Functions – ElectronicsGuide4u“? We answer all your questions at the website Chambazone.com in category: 40+ Marketing Blog Topics & Ideas. You will find the answer right below.
Keep Reading
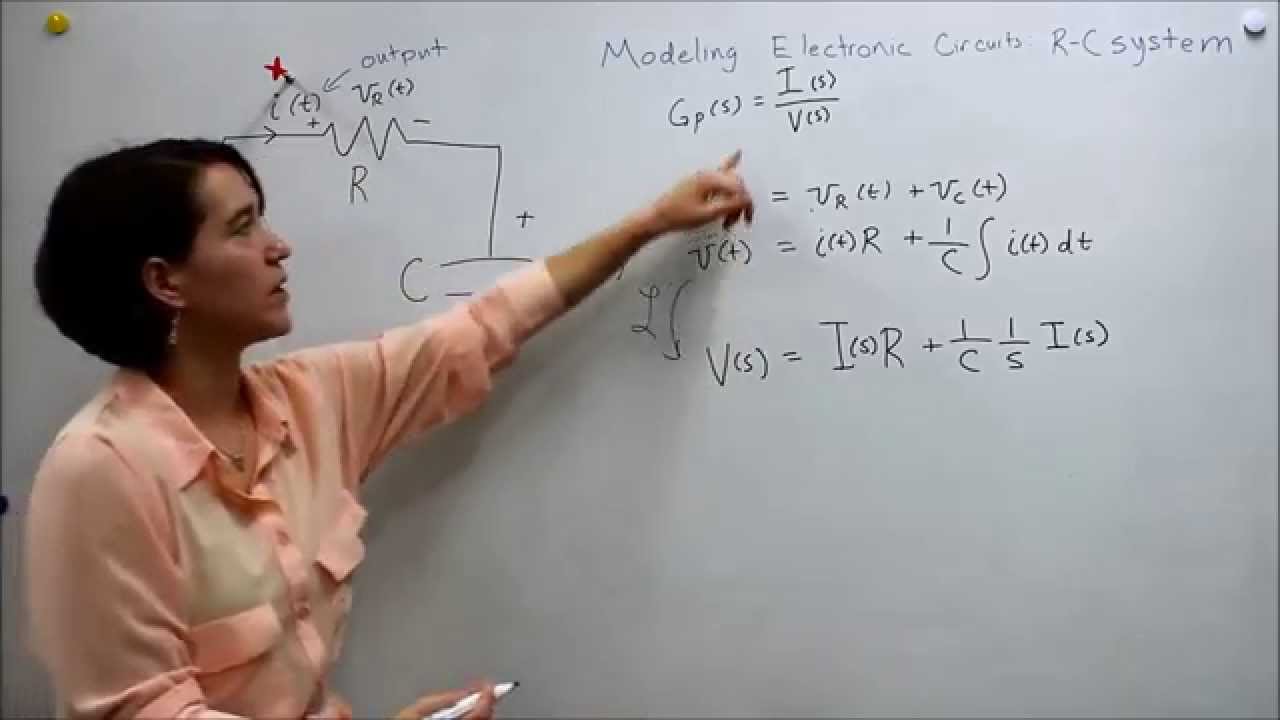
Intro to Control – 2.3 Transfer Function for an R-C Systems
Images related to the topicIntro to Control – 2.3 Transfer Function for an R-C Systems
Howdy, fellas!! I hope you already acquaint yourself with the Control System subject overview (from my previous posts). So let’s not waste our time further and get started with the basics of this subject(i.e the Transfer Function overview which is the basic building block of any control system) . In Control systems, we mainly deals with mathematical models and their analysis. So we should first understand what mathematical modelling is ?? Modelling something is a way to express their systems in math terms allowing to utilize the physics concepts on it. We truly need some representation of our plant in writing, since it is very costly to be able to always check and experiment different inputs and parameters repeatedly for just about any process that is exactly same. A model that is mathematical proves the straightforward, demonstrative and appreciable interpolation and extrapolation of this process we are concerned of. This model further assist us to design the controllers and control system that is optimal. In Control Systems, models are referred to as systems. A system is represented as a block consists of atleast one input and output signal. Further, the input will be referred as ‘excitation’ and output as ‘response’. So what exactly the transfer function is ? For almost any control system, there fundamentally exists a reference input that is referred to as the main cause or excitation which generally runs via a series of transfer processes known as the transfer function and creates an effect causing the response reaction. Therefore the reason and the impact relationship between an input and output is therefore linked to one another through the transfer function. Definition: A transfer function in any control system is defined as the ratio of Laplace transform of the output to that of the Laplace transform of given input function assuming all the initial conditions to be zero. What is the use of the Laplace transforms? Transfer function of any system is basically used for the mathematical evaluation of any system (consists of differential equations). Laplace is the easiest form to resolve any differential equation . In most of the cases , the input and the output of any given system may not be in same category. For instance, a motor generally converts the electrical power into mechanical form of energy. It is furthermore important to express the output and input in the form of same quantity mainly for the feasibility of the mathematical analysis. Hence we generally use the Laplace transforms for the transformations (conversions) of all kinds of signals to a simple common form. What does it mean by initial conditions are zero? We take the initial condition to be zero in order to make RHS of transfer function independent of the input. The transfer function method is mainly val for the linear time invariant (LTI) systems. All the electrical control systems generally consists of the R, C or L elements or the mixture of any of theses elements . These parameters are linear time invariant (LTI) which means that their values do not change with regards to time. Since these parameters are independent of the variations of time parameter, we thus must proceed with the approach that is same for any control system. Hence we conser (assume) all the initial conditions to be zero.( this can be a demerit of utilizing a transfer system. But this might be taken well cared in state space analysis). Method of finding transfer function: We need to first find separate equations for input and output in any given physical system. Now we shall take the Laplace transform of the system equations, thereby assuming the initial conditions as zero. Finally we have to take ratio of the Laplace transforms of output and input. Poles and Zeroes of a transfer function: In layman terms, we can say that the Poles and Zeros of any transfer function are simply the frequencies for which the values of the numerator and denominator of the transfer function becomes zero . Why Poles and Zeros important? It defines and helps us to determine the stability of the system, which is very critical (this aspect we will learn in my later posts) Poles: These are the values of Laplace transform variable, which makes the transfer function to become infinite. Poles we can find out by equating the denominator of any transfer function to zero. Zeroes: These are the values of Laplace transform variable, which makes the transfer function to become zero. Zeros we can find out by equating the numerator of the transfer function to zero. In the Laplace plane(s-plane) we have two axis(s= σ+jω) i.e imaginary axis(jω) and real axis (σ). Poles are represented by “x” and zeros are represented as “o” on s plane. If the transfer function is given as : To find poles, we will equate denominator to zero and for zeros, we will equate numerator to zero. on equating we get, 2 poles i.e s = -2,-1 and one zero i.e s = 1/3 (as shown below) Some important points to be noted regarding Transfer Function The concept of transfer function is only defined for LTI systems. Stability can be determined from the characteristics equation (discussed in later post). Proper and improper Transfer Functions If a transfer function has more poles than zeros (i.e order of denominator is more than order of numerator), then it is proper transfer function And if number of zeros is more than number of poles(order of numerator more than order of denominator), then it is called improper transfer function. Mostly we get to deal with proper transfer function, as the integrator (proper transfer function) used to reduce the amplitude of noise signals and thus surpasses the higher frequency noise. whereas the differentiator( improper transfer function) enhances the noise signals. Advantages of Transfer function: From this we will get the poles and zeros, and hence we can infer the response of the system. The integral and differential equations can be converted to simple algebraic equation. This is a mathematical model that gives the gain of the given block/system. Disadvantages of Transfer function: It does not take into account the initial conditions. Only val for linear time invariant systems. Analogous Systems: If we further analyse the equations (this will be discussed in detail in my later post) for mechanical translational or rotational systems with electric systems, it can be found that they are of similar forms.(I am directly giving the analogy, for the equations you can refer any standard book of Control System) Force-Voltage Analogy: Mechanical translational System Mechanical rotational System Eletrical System Mass M Moment of inertia – J Inductance L Force F Torque – T Voltage – V Viscous friction Coefficient f viscous friction coefficient – f Resistance R Spring stiffness k Tortional spring Stiffness k Reciprocal of capacitance 1/C Velocity v Angular velocity- ω Current i Displacement x Angular displacement-θ Charge q Force – Current analogy: Mechanical translational System Mechanical rotational System Eletrical System Mass M Moment of inertia – J Capacitance C Force F Torque – T Current i Viscous friction Coefficient f viscous friction coefficient – f Reciprocal of Resistance 1/R Spring stiffness k Tortional spring Stiffness k Reciprocal of inductance 1/C Displacement x Angular displacement-θ Magnetic Flux Linkage φ Velocity v Angular velocity- ω Voltage V From the above, it is much event that all the three systems are analogous to each other and equations of one system can be converted into other. report this ad
What is transfer function of a control system?
In engineering, a transfer function (also known as system function or network function) of a system, sub-system, or component is a mathematical function which theoretically models the system’s output for each possible input. They are widely used in electronics and control systems.
How do you find the transfer function of a system?
To find the transfer function, first take the Laplace Transform of the differential equation (with zero initial conditions). Recall that differentiation in the time domain is equivalent to multiplication by “s” in the Laplace domain. The transfer function is then the ratio of output to input and is often called H(s).
What is Type 2 in control system?
A type-II control loop achieves zero steady state position and velocity error, a type-III control loop achieves zero steady state position, velocity and acceleration error and therefore a type-p control loop is expected to track both faster reference signals and eliminate higher order errors at steady state.
What is proper and improper transfer function?
Explanation : Improper Transfer Function measures that the order of numerator must be greater than that of denominator, while proper transfer function measures that the degree of numerator should not exceed than the degree of denominator.
Why transfer function is used?
The key advantage of transfer functions is that they allow engineers to use simple algebraic equations instead of complex differential equations for analyzing and designing systems.
What is transfer function and its properties?
The transfer function of a system is the mathematical model expressing the differential equation that relates the output to input of the system. • The transfer function is the property of a system independent of magnitude and the nature of the input.
What is a transfer function in circuits?
The Transfer Function of a circuit is defined as the ratio of the output signal to the input signal in the frequency domain, and it applies only to linear time-invariant systems.
How do you write a transfer function for a circuit?
The transfer function H(s) of a circuit is defined as: H(s) = The transfer function of a circuit = Transform of the output Transform of the input = Phasor of the output Phasor of the input . RC . Transfer function is normally expressed in a form where the coefficient of highest power in the denominator is unity (one).
What is type1 system?
[Solved] Type 1 system means that open-loop transfer function has a n. Home. Control Systems. Time Response Analysis.
What is open loop transfer function?
The point-to-point open-loop transfer function is the response obtained by opening the loop at the specified locations, injecting signals at those locations, and measuring the return signals at the same locations.
What is pole in control system?
In control system poles and zeros defined by transfer function of any system. Zeros are the roots of numerator of given transfer function by making numerator is equal to 0. Poles are the roots of denominator of given transfer function by making. Denominator is equal to 0.
Why are improper transfer functions non causal?
Improper transfer functions are non-causal because their outputs depend (among other things) on future values of their inputs, whereas the condition for causality is that the output must depend only on inputs up to the current instant in time.
What is the order of transfer function?
In a transfer function representation, the order is the highest exponent in the transfer function. In a proper system, the system order is defined as the degree of the denominator polynomial. In a state-space equation, the system order is the number of state-variables used in the system.
Can an improper transfer function be stable?
An improper system cannot be causal and stable. If the order of the numerator is greater than the order of the denominator, you’ll always have at least one pole at infinity. Consequently, not all poles are in the left half-plane (or inside the unit circle in the case of discrete-time systems).
See some more details on the topic Control System – Transfer Functions – ElectronicsGuide4u here:
Control System – Subject Overview – Electronicsguide4U? The …
Let’s take a look at the important topics in the topic of control systems: Transfer function The transfer function gives the relationship …
Transfer Function of Control System | Electrical4U
A transfer function represents the relationship between the output signal of a control system and the input signal, for all possible input …
Control System Transfer Function – javatpoint
Control System Transfer Function with tutorial, introduction, ification, mathematical modelling and representation of physical system, transfer …
Transfer Function of Control System – Electronics Coach
The transfer function of a control system is defined as the ratio of Laplace transform of output to that of the input, consering all the initial …
Related searches to Control System – Transfer Functions – ElectronicsGuide4u
- control system transfer functions 4u pdf
- electrical control system pdf
- introduction to control systems pdf
- Transfer function
- transfer function
- control system electrical4u
- control system transfer functions 4u pdf free download
- control system for beginners
- electrical control system examples
- automatic control system
- what is control system in electrical engineering
Information related to the topic Control System – Transfer Functions – ElectronicsGuide4u
Here are the search results of the thread Control System – Transfer Functions – ElectronicsGuide4u from Bing. You can read more if you want.
You have just come across an article on the topic Control System – Transfer Functions – ElectronicsGuide4u. If you found this article useful, please share it. Thank you very much.